Inhaltsverzeichnis
3d-bodyscanner
Wir haben einen Vitus Smart XXL 3D-BodyScanner aus dem Jahre 2000 bekommen. Er stand zu Testzwecken momentan in der Kueche vor den Getraenkeautomaten, sein endgültiger Standort ist OR4 an der abgeschlossenen Tür. Für diesen Ort muss der Lasercutter noch umgeräumt werden.
Computer
Mitgeliefert wurde ein Pentium3 Rechner mit 400MHz und 512MB RAM. Auf ihm laeuft Windows NT 4.
Die 20GB Maxtor IDE HDD wurde von ttb und momo vor allem gebackupt, sie hat I/O-Errors, ca. 32kB sind verloren gegangen. Das Backup wurde mit ddrescue /dev/sda scanner.rescue logfile angelegt und liegt jetzt auf shack.shack.
Die HDD wird vom Computer allerdings als nicht bootbar bemaengelt. Das DDRescue-Image wurde von Jules auf eine neue HDD gebuegelt. Damit bootete dann der Rechner.
ciko ignoriert diese Software für den Wiederbelebungsversuch komplett.
Software
Zum Stand der Software einfach auf mitglieder@ fragen.
Wiederbelebungsversuch
(ciko 30.03.16)
- Schrittmotoren sind EC-MOTION SECM566-T1.4A, 1.5V DC, 1.4A, 0.72°/Step.
- Oben an der Umlenkrolle des Riemens ist ein Sensor befestigt, der mit einem 2Pol Stecker angeschlossen wird. Ich vermute etwas in Richtung Ritzelzähler?
- Am untersten Punkt des Schlittens gibt es eine Gabel, durch die der Schlitten fährt. 3-Pol Anschluss, vermutlich Lichtschranke o.Ä. (+/-/Signal)
- Ich spreche mal exco an wo die Treiber sind und wie man die am besten anert.
(ciko 02.04.16)
- Mit Phil einen Motor abgeschraubt
- HTD 5M 9 18 bestellt um Phils Motoren adaptieren zu können.
(ciko 08.04.16)
- Ritzel sind da und können von exco gehohnt werden
- Die Laser sind Lasiris 685s-50 und werden laut http://www.dtic.mil/dtic/tr/fulltext/u2/a412048.pdf mit 5V versorgt. Steuerung: TTL, 0 ist an und 1 ist aus
- Stellt sich raus: Ab ca 3V funktionieren die Module und projezieren einen Strich. Das war einfach.
(ciko 09.04.16)
- Mit exco Adatpterplatten gefräst, damit passen die Plexi 3D-Drucker Motoren an die Aufnahmen. Adaptionsmuttern für die Ritzel gebaut und ein Ritzel damit ausgestattet
- Motor mit Treiber angesteuert: Dreht sich!
- Die Kraft reicht nicht zum hochfahren. Todo: Rampen in Software fahren und herausfinden welche Frequenz maximale Kraft ergibt
(ciko 11.04.16)
- Messbrett gebaut um Kameras einzumessen


(ciko 12.04.16)
- Messbrett verworfen, neuer Plan: Mit einem Beamer jeweils einen Punkt auf die Fläche projezieren. Damit ein Mapping bauen SensorPixel → reale Koordinate
- Angefangen Software für diesen Plan zu hacken
(ciko 15.04.16)
- Weiter Software gehackt. Mit dem Beamer einmessen erfordert recht viel Interpolation die man von Hand machen muss.
- Neue Software mit OpenCV geschrieben, die wieder perspektivische Transformation anwendet.
- Neues Messbrett gebaut um Korrektheit
(ulrich 15.04.16)
- git repo angelegt: https://github.com/shackspace/body-scanner
- crepelcode für Schrittmotorsteuerung eingefügt
(ciko 16.04.16)
- Neuer Code für die Kalibrierung der Kameras geschrieben. Damit kann man interaktiv die Kameras einmessen.
- Erstes Testbild gemacht mit dem sich jetzt die Punktextraktion bauen lässt.
(ulrich 16.04.16)
- crepelcode für Schrittmotorsteuerung noch mehr verkrepelt
- serial commands hinzugefügt
(ciko 19.04.16)
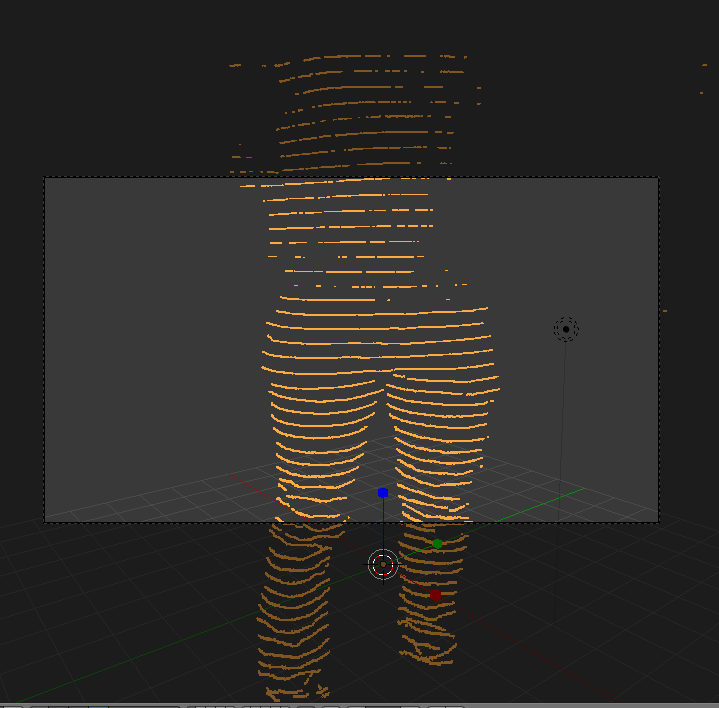
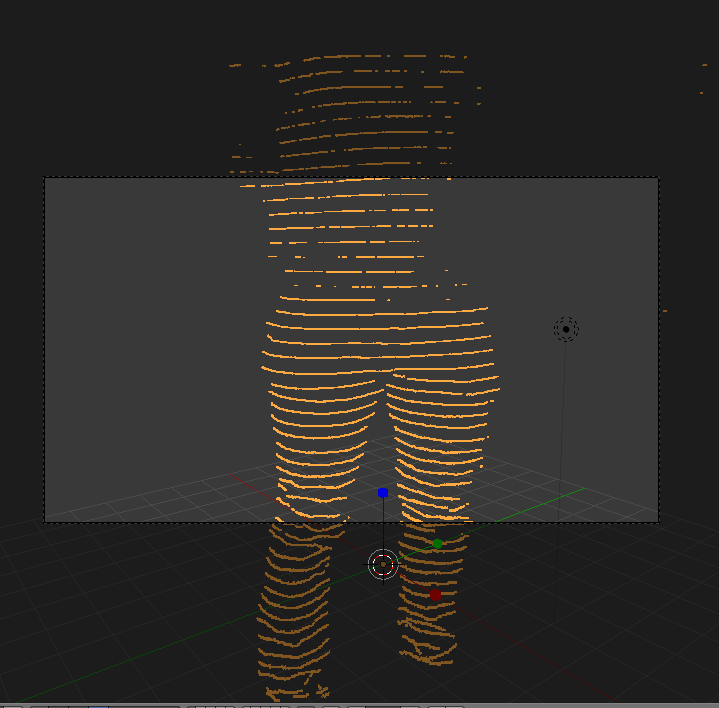
- Code zum Verarbeiten der Bilddaten fertiggemacht und ersten 3D-Slice extrahiert
- Die Perspektivtransformation führt zu doofen Punktwolken, für eine Beta okay aber final muss man das anders lösen
- Verstanden warum das Einmessen manchmal stirbt und das geradegezogen
- Schrittmotortreiber in die Temperaturabschaltung gefahren. Der Treiber hat Strom gezogen obwohl er im Leerlauf war. Verrmutlich spinnt die Initialisierung manchmal. Ein/Ausschalten des Arduinos hilft.
(ciko 24.04.16)
- Erster brauchbarer Scan
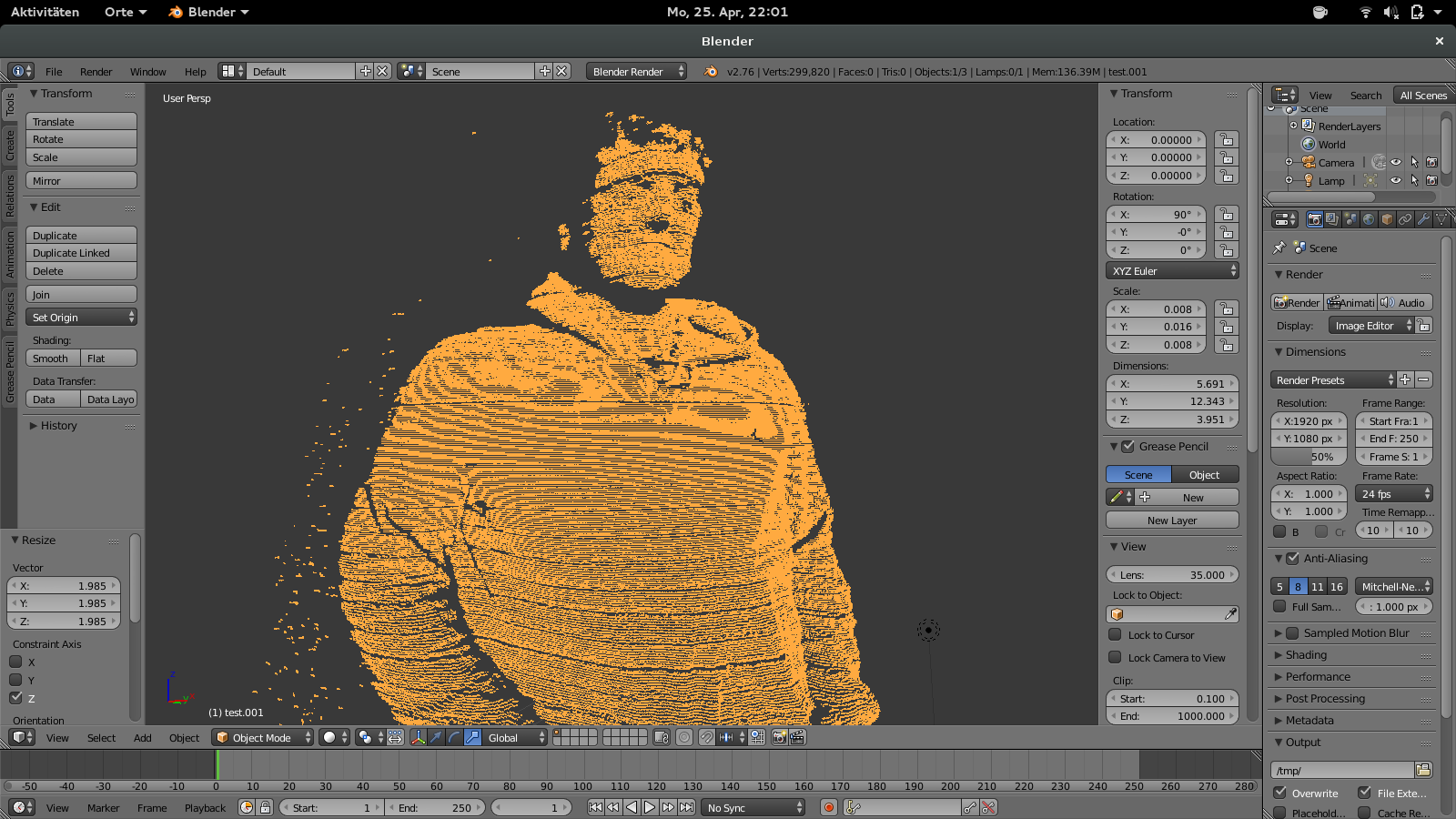
(ciko 25.04.16)
- Besserer Algo, besserer Scan


(ciko 28.04.16)
- Shitty Webcams getestet - tut, wenn auch weniger cool
- Hardware Dinge sind da
- 15€ Webcam bestellt
(ciko 30.04.16)
- Mehr Leute gescannt
(ciko 01.05.16)
- Neuer Code, der keine Frames mehr wegwirft
- FPS Einstellen ist schwierig, weil der v4l2 Support das nicht kann. OpenCV neu kompilieren?
- Warten auf OrangePi und Kamera zum festverbauen
(ciko 03.05.16)
- Neue Webcamund OrangePi One sind da.
(ciko 05.06.16)
- Software auf den OrangePi portiert
- Kamera und OrangePi montiert
(ciko 19.06.16)
- Aufbau neu gemacht
- Breadboard an die Säule geklebt
- Motor wrrrrt beim Einschalten, vermutlich irgendwo Kontaktfuckup auf dem Sleep Pin
(ciko 25.06.16)
- Die lange Leitung zum Schlitten war das Problem
- OrangePi klebt jetzt auch unten an der Säule
- Tut wieder
- In die Schleppe muss jetzt also einmal USB (Kamera) und einmal 5V (Laser)
(ciko 03.07.16)
- Aufbau auf Breadboard lief dann wieder nicht. Auf einem anderen Breadboard dann aber doch
(ciko 04.07.16)
- Mit Buchsenleisten und Lochraster eine Platine für den Treiber gelötet
- Rampen wieder in Software implementiert
- Bisschen mit der Belegung rumgespielt
- Half Step rulort
- Tut wieder \o/
- Next Steps: Aufbau besser machen (Befestigung an der Säule usw), dann mal wieder einen Scan
(ciko 05.07.16)
- Neuer Aufbau, OrangePi und Treiber auf einem Board
- Code auf dem OrangePi optimiert
- Fährt noch
- Sensor und Laser wieder angeschlossen. tut.
(ciko 06.07.16)
- Code vom OrangePi wieder gebackportet
(ciko + (trag dich mal hier ein!) 08.07.16)
- Kabel aus der Kabelschleppe raus
- USB Kabel + 2 Litzen (Laserstrom rein)
- Schlitten geht jetzt viel einfacher
- Der OrangePi hat Probleme mit gleichzeitig rechen und Motorsteuerung fahren. Vermutlich sollte man erst alle Bilder capturen und dann die Berechnung machen.
(ciko 10-17.07.16)
- Motorsteuerung auf den Arduino zurückportiert
- Neues Protkoll um den Arduino vom OrangePi anzusprechen
- Multicore-Optimierung der Software um den ORangePi auszulasten
(ciko 18.07.16)
- Festegestellt, dass die Webcam Mist ist
- Raspi3 bestellt
- RaspiCam v2 bestellt
(ciko 20.07.16)
- Kram angekommen
(ciko 25.07.16)
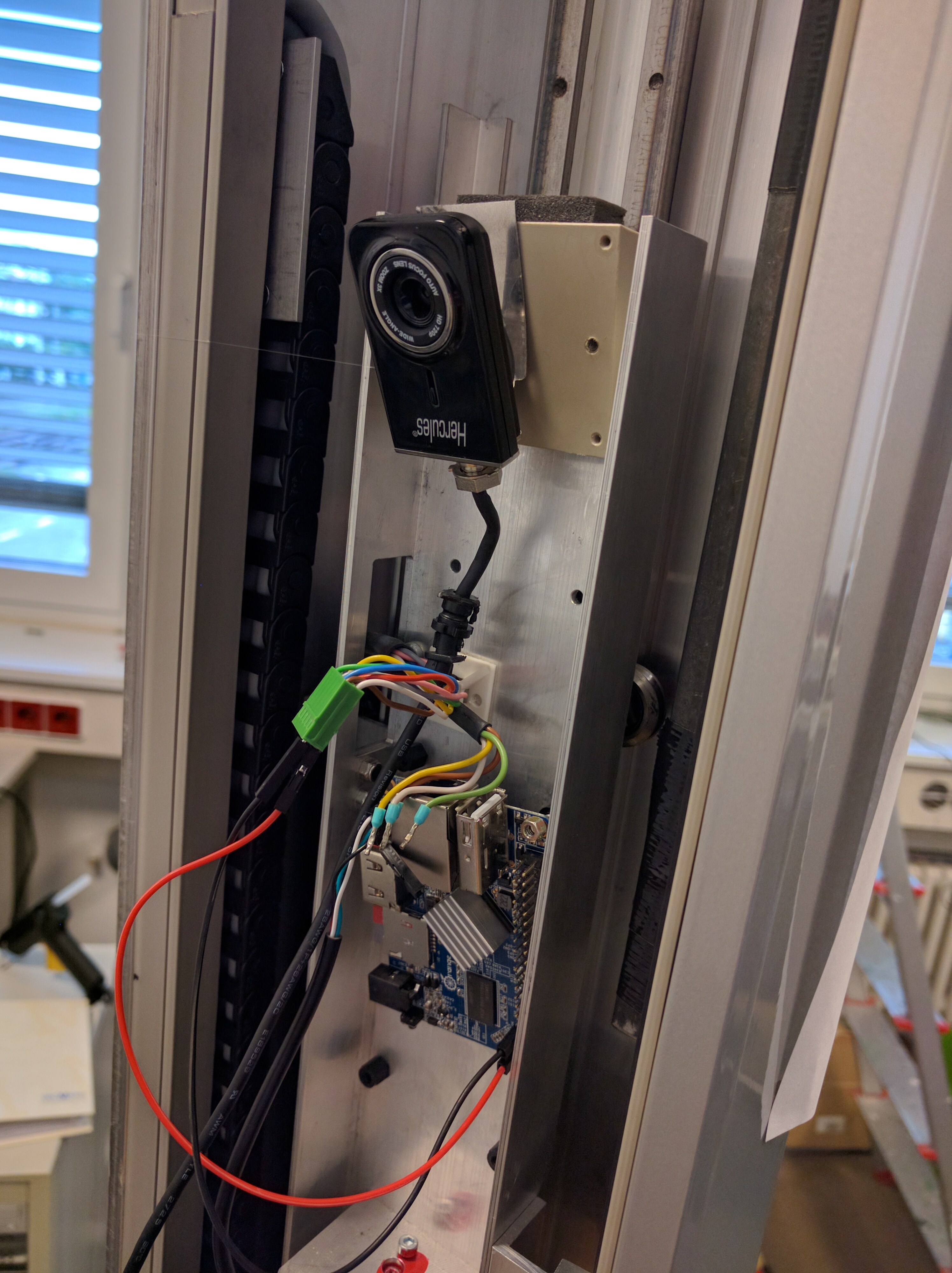
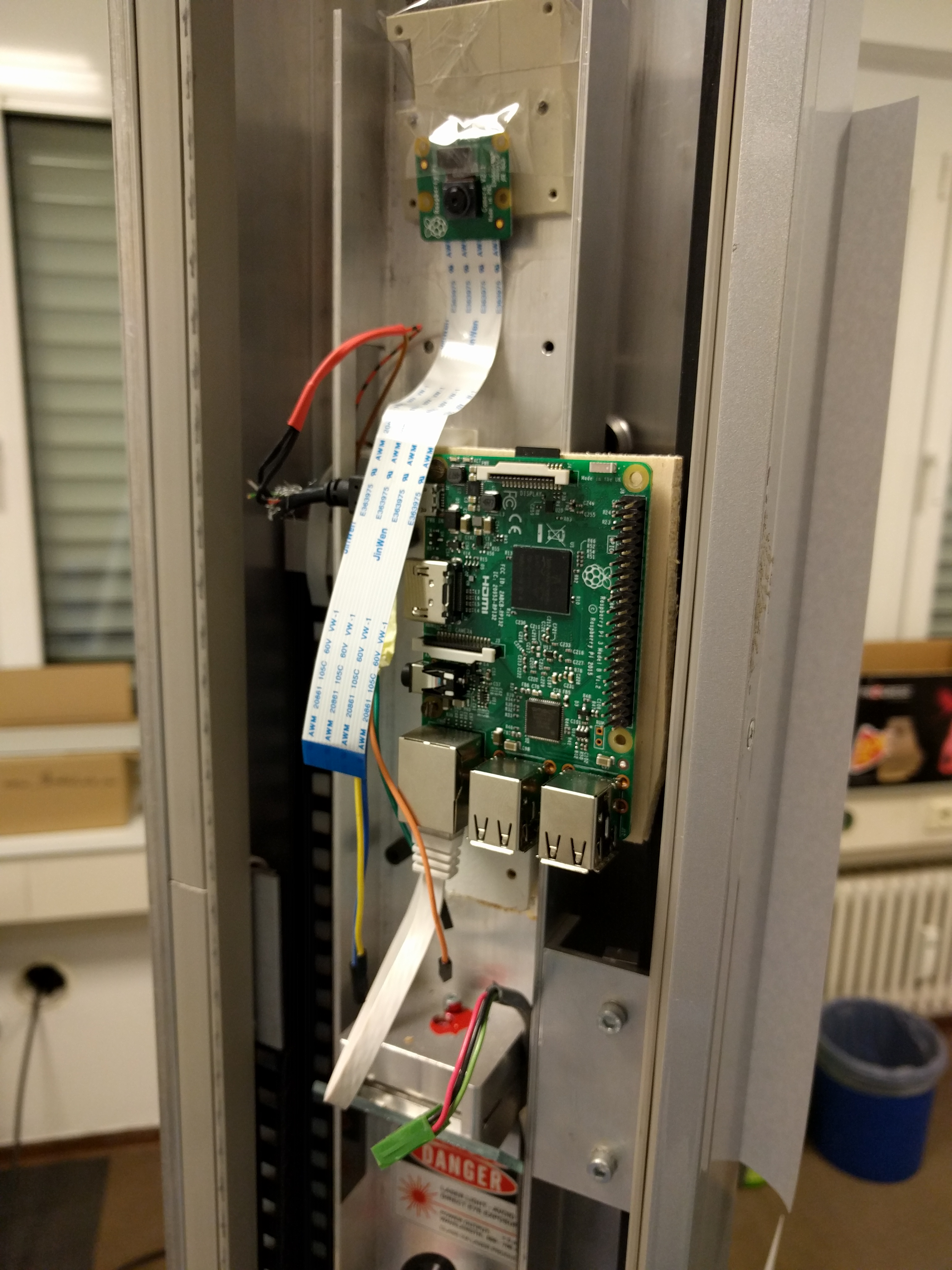
- Halterung für den Raspi gebaut (magnetisch, man kann den Raspi so reinklicken)
- Kamera provisorisch eingebaut
- Software portiert, damit sie mit dem Raspi funktioniern kann
- Die Kamera ist ziemlich awesome

(ciko 15.08.16)
- 4-Pol Steuerkabel für den Arduino gebaut
- Kamerasoftware gepimpt
(ciko 18.08.16)
- Kabel durch den SChlepp (4pol + 2Pol Strom + Ethernet)
- Kabelschlepp wieder montiert

(ciko 23.08.16)
- Erster Scan mit neuem HW setup


2Dos:
- Kamera fest mounten und justieren (Kamera kippen damit mehr xy Auflösung)
- Säulen enger beisammen, da KameraPOV besser
- Stromversorgung auf USB Netzteil (5V) + Motortreiber (~24V) umbauen
- Stepper Software von Duemilanove → Micro umflashen und umstecken
- Stepper Treiber besser kühlen
- Software optimieren
- Web Interface